
Likus keliems mėnesiams iki Velykų užmačiau internetuose visokius prietaisus kiaušinių apipiešimui su kompiuteriu. Tie įrengimai kainavo 200 - 500 $, bet iš pažiūros gana nesudėtingi, taigi nutariau kažką panašaus pasigaminti iš to ką turiu "po ranka"
Kad pasigaminti visą šį džiaugsmą reikėjo susirasti visas medžiagas ir priemones. Žinoma gamybos metu kaikas pasikeitė, galutiniam rezultatui prireikė:
- Arduino UNO
- CNC Shield V3.0
- Dviejų žingsninių varikliukų valdiklių (draiverių) DRV8825
- Žingsninis variklis 42SHA34B2RC
- Žingsninis variklis 23LM-C352-15, šitą dar gal pakeisiu į kokį mažesnį 42 serijos
- Servo varikliukas SG90
- Seno vidiako galvutės mechanizmas
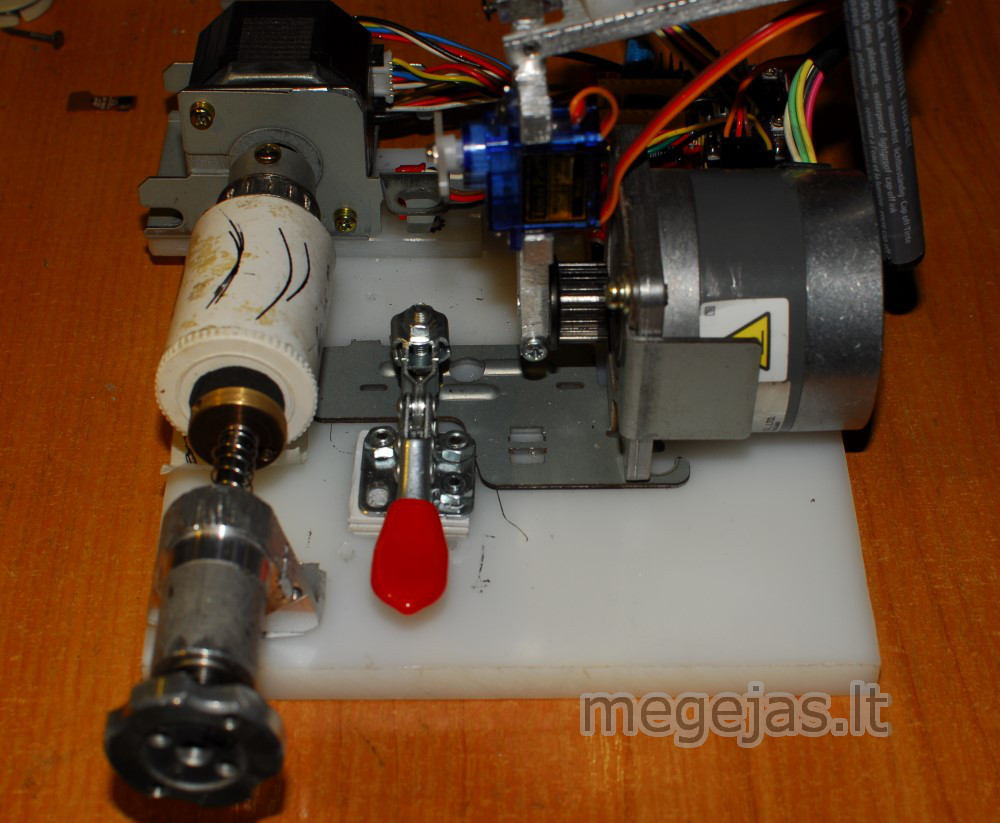
- Kinietiškas prispaudėjas (clamp)
- Plastiko gabalas pagrindui
- šiek tiek aliuminio ir kitos smulkmės
- Laiko viskam sirinkti
- Kantrybės aiškinantis kaip tai valdyti
Nuo ko viską pradėjau
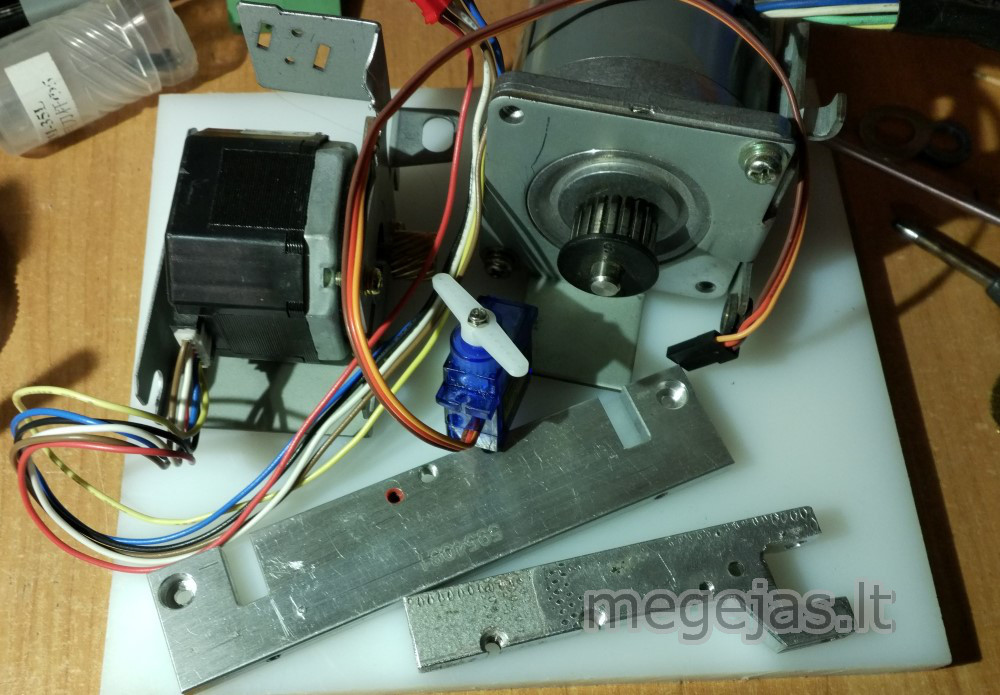
Iš aliuminio gabaliukų metalo pjūkleliu išpjoviau dvi detales, išgręžiau skyles

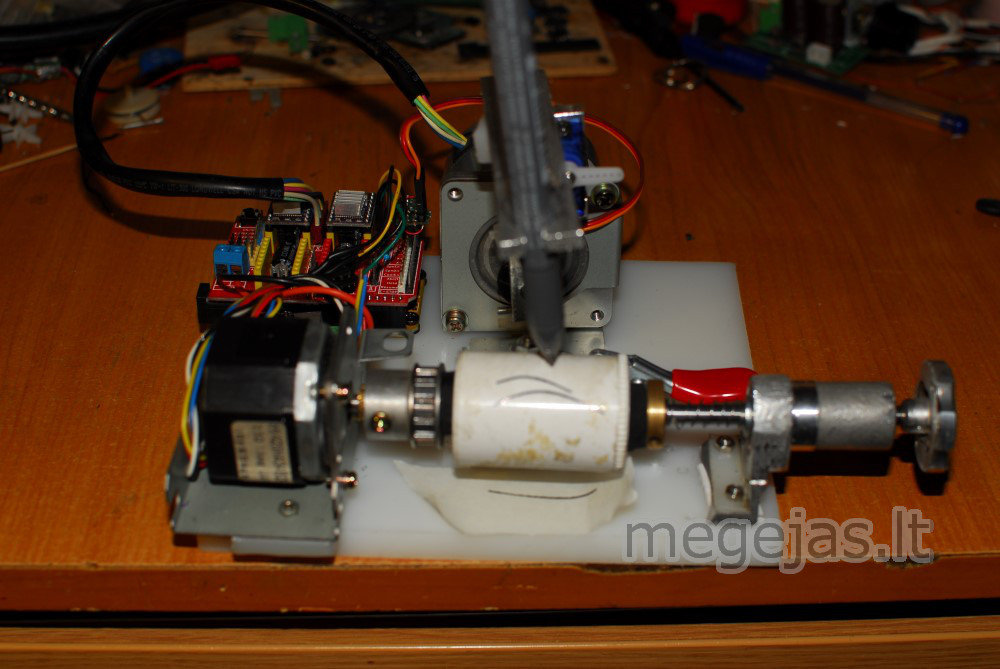
Dalinai surinktas aparatas

Kaip slankiojančią atramą pasirinkau kažkokio seno video magnetofono galvutės mazgą, ten ašis labai lengvai slankioja išilgai, bet visiškai nekliba guoliuose

Nupjoviau nereikalingas dalis, truputį aptekinau bronzinę dalį

Kiaušiniui laikyti panaudojau kažkokią minkštą gumą, iš jos dviejų skirtingo diametro vamzdelių pagalba iškirtau žiedus

Surinktas aparatas atrodė taip
Čia prasidėjo rimtesnės bėdos - kaip visa tai valdyti. Bandžiau įvairias programas kompiuteriui ir valdikliui. Iš pradžių "Benbox", kažką iš "Eleks Laser". Pamačius kaip visa tai baisiai veikia, nusprendžiau pereiti prie GRBL 0.8c ir G kodo programų. Vęliau pakeičiau į GRBL 0.9j su servo varikliuko valdymu.G kodo konvertavimui iš paprasto lazeriui skirto į tinkamą mano įrenginiui ir pačiam valdymui bandžiau labai daug žadančią programą "GRBL-Plotter_1_0_3_0". Bet siunčiant G-kodą (su "on-line" konvertavimu) pastoviai gaudavau komunikacijos klaidas, kažkas joje dar smarkiai neišbaigta. Galutinis kol kas naudojamas variantas - Java "Universal-G-Code-Sender" V1.0.9 ir "Inkscape" su "plugin'ais" ir "Notepad++" galutiniam G-kodo pakoregavimui.
Bandymai

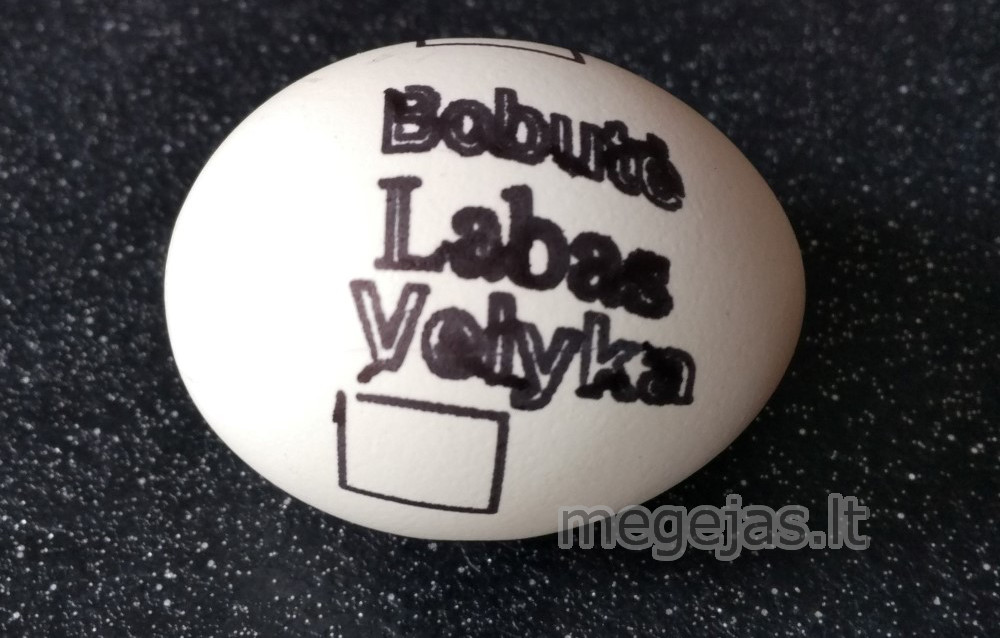
Pastebėjau, jog gaunamas paveiksliukas visada yra pakrypęs ir to neina ištaisyti perstatant piešiančio žingsninio varikliuko padėtį, nei pastumiant į šoną, nei pakreipiant jo darbinę ašį įstrižai. Teko taisyti šiek tiek kreivai išgręžtą lanksto sujungimą. Praplatinau skylę į reikiamą pusę, o kad ašelė nesitabaluotų išgręžiau ir įsriegiau M2,5 skylutę varžčiukui.


Apie nustatymus ir "hardwar'ą". CNC-shield trumpikliai uždėti ant M0 ir M1 kontaktų, varikliukai dirba 1/8 žingsnio režimu, iš viso 1600 impulsų apsisukimui. Kiaušinį sukantis varikliukas yra "Y", markerį - "X". Taip gaunamas vertikalus panašiai 160X40 mm lapas "Inkscape" programoje. Nors rastriniams paveiksliukams greičiausiai reikėtų atvirkščiai, gautusi mažesnis judėjimas "backslash", nes standartiniai rastriniai skriptai generuoja užspalvinimą X kryptimi. Pagrindiniai GRBL nustatymai:
$100=10.000 (x, step/mm)
$101=10.000 (y, step/mm)
$102=2.000 (z, step/mm)
$110=30000.000 (x max rate, mm/min)
$111=30000.000 (y max rate, mm/min)
$112=30000.000 (z max rate, mm/min)
$120=1500.000 (x accel, mm/sec^2)
$121=2000.000 (y accel, mm/sec^2)
$122=1000.000 (z accel, mm/sec^2)
Markerio kilnojimui (servo varikliukui valdyti) naudoju M03 SXX komandas. XX reiškia servovarikliuko kampą laipsniais. Pakeltas M03 S0 arba M05, nuleistas M03 S30. Viskas priklauso nuo markerio tvirtinimo, kartais pakėlimui naudoju M03 S10. Beje, kadangi markerio nuleidimas - pakėlimas užima tam tikrą laiką, dar pridedu papildomas pauzės komandas G4 P0.1.
Dėl tos pauzės ir dėl to, kad naudojamas "microstepping" gaunasi dideli "pabėgimai", nes pauzės metu išjungiamas varikliukų "laikymas", o kadangi varikliukas gali būti bet kurioje tarpinėje padėtyje tarp pusinių žingsnių, jis pasisuks į artimiausią pusinio žingsnio padėtį. Tam sugalvojau padaryti "hardwarinį" EN signalo uždelsimą, teko panaudoti du BC546 tranzistorius ir kelias papildomas detales. "Firmwarinio" nedariau dėl to, kad paskui įrašius kitą niekas nebeveiktų ir reikėtų vėl prisiminti, ką ten buvau pakeitęs.
Po keleto dienų pridėsiu daugiau foto ir video...
Pagaliau įkėliau video
Paskutiniame video matosi, kaip prastai peišiasi paveiksliukas kairėje pusėje, nes, pasirodo, markerio vienas kraštas gerokai pavarges
